


一、准备:授权与软件包
必须授权:机器人要有 KUKA.EtherNetIP MS(主站) 选项。
示教器:菜单 → 系统 → 选项,检查是否有此授权。
安装软件包到 WorkVisual
KUKA.EtherNetIP MS(主站包)从站 EDS 文件(如欧姆龙 / 罗克韦尔 PLC 的 EDS)。
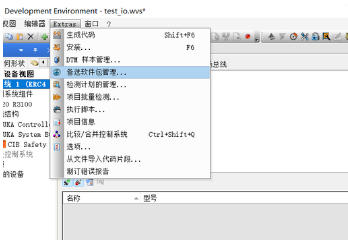
打开 WorkVisual → 工具 → 备选软件包管理 → 安装:

二、新建 / 打开项目并激活控制柜
连接电脑与机器人(KLI 口 X66),打开或新建项目。
双击控制柜(如
KRC4)→ 激活(必须激活才能配置总线)。

三、添加 Ethernet/IP 主站
左侧 “设备” → 展开控制柜 → 右键 总线结构 → 添加 → 选 EtherNet/IP → 确定。
双击新增的 EtherNet/IP 打开配置界面。

四、配置主站基础参数(通信设置)
在 Communication Settings 标签:
Network Interface:选之前设好 IP 的 Virtual5(KLI)。
IP Address:使用系统网卡 IP(不要在这里单独设,示教器设好即可)。
Scanner Enable:勾选 Enable Scanner(主站)。
扫描范围:
Start IP:
192.168.1.1End IP:
192.168.1.254RPI(请求间隔):20 ms(默认,实时性可调)。
点 Apply 保存。

五、添加从站(PLC / 设备)并配置 I/O
5.1 导入从站 EDS(首次需做)
工具 → 设备描述文件(EDS)管理 → 导入 PLC 的 EDS 文件(如欧姆龙
omron.eds)。
5.2 添加从站到总线
右键 EtherNet/IP → 添加 → 选已导入的从站(如欧姆龙 PLC)→ 确定。
双击从站 → 配置:
从站 IP:
192.168.1.20(PLC 实际 IP)输入字节数(PLC→机器人):32 Byte(256 点 DI)
输出字节数(机器人→PLC):32 Byte(256 点 DO)
Assembly ID:输入 100、输出 101(与 PLC 一致)。

六、映射机器人 I/O 信号(关键)
左侧切换到 I/O 映射 标签。
分割信号(便于分配):右键 → 分割所有信号。

分配信号:
选左侧 KRC 输出(如
DO2000)→ 右侧选从站输出 → 连接。选左侧 KRC 输入(如
DI2000)→ 右侧选从站输入 → 连接。输入(PLC→机器人):
输出(机器人→PLC):

七、编译、下载与冷启动
菜单栏 → 生成代码(无报错)。
点击 安装 → 下载到机器人控制柜。
示教器:关机 → 冷启动(必须,否则 EIP 主站不生效)。
八、快速验证与排错
示教器查看状态:菜单 → 系统 → 总线 → EtherNet/IP → 主站状态为 运行,从站已连接。
ping 测试:机器人 ping PLC IP,正常通则网络没问题。
信号测试:在示教器 I/O 界面,强制 PLC 输出,机器人对应 DI 应同步变化;强制机器人 DO,PLC 侧输入应变化。
九、常见参数模板
机器人主站 IP:
192.168.1.10PLC 从站 IP:
192.168.1.20子网掩码:
255.255.255.0输入 / 输出:32 Byte(256 点)
RPI:20 ms
Assembly ID:输入 100、输出 101.
